DESARROLLO DE PROTOTIPO DE SOFTWARE
Under Exploration

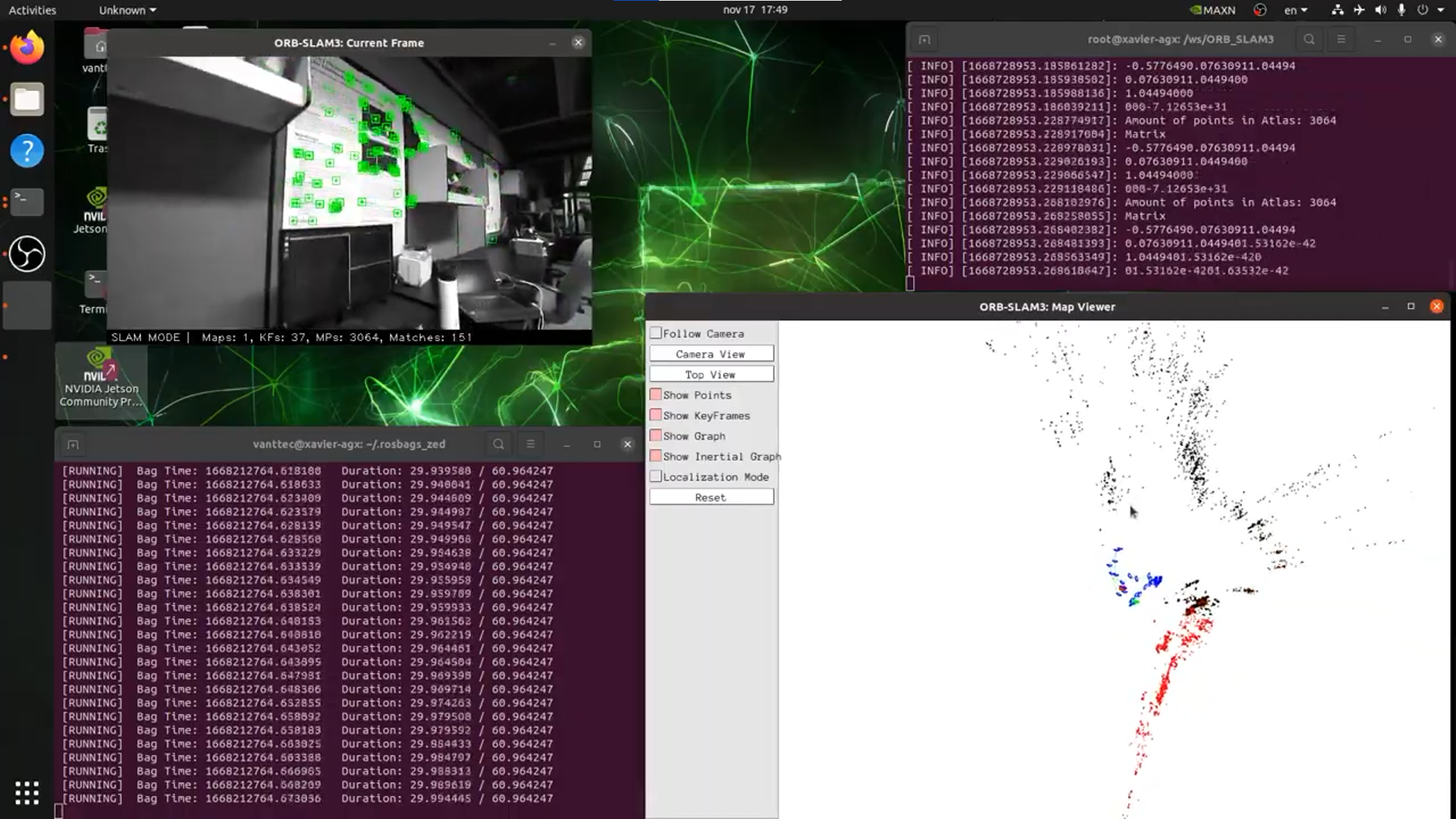
Este proyecto actual busca explorar herramientas de localización a través de mapeo y odometría para con enfoque en navegación autónoma de robots subacuáticos (UUV).


Contacto
Sofía Martínez Hernández A01721802@tec.mx, +52 8116051368