DESARROLLO DE PROTOTIPO DE SOFTWARE
Simulación y detección de fugas de gas con robots remotos asíncronos
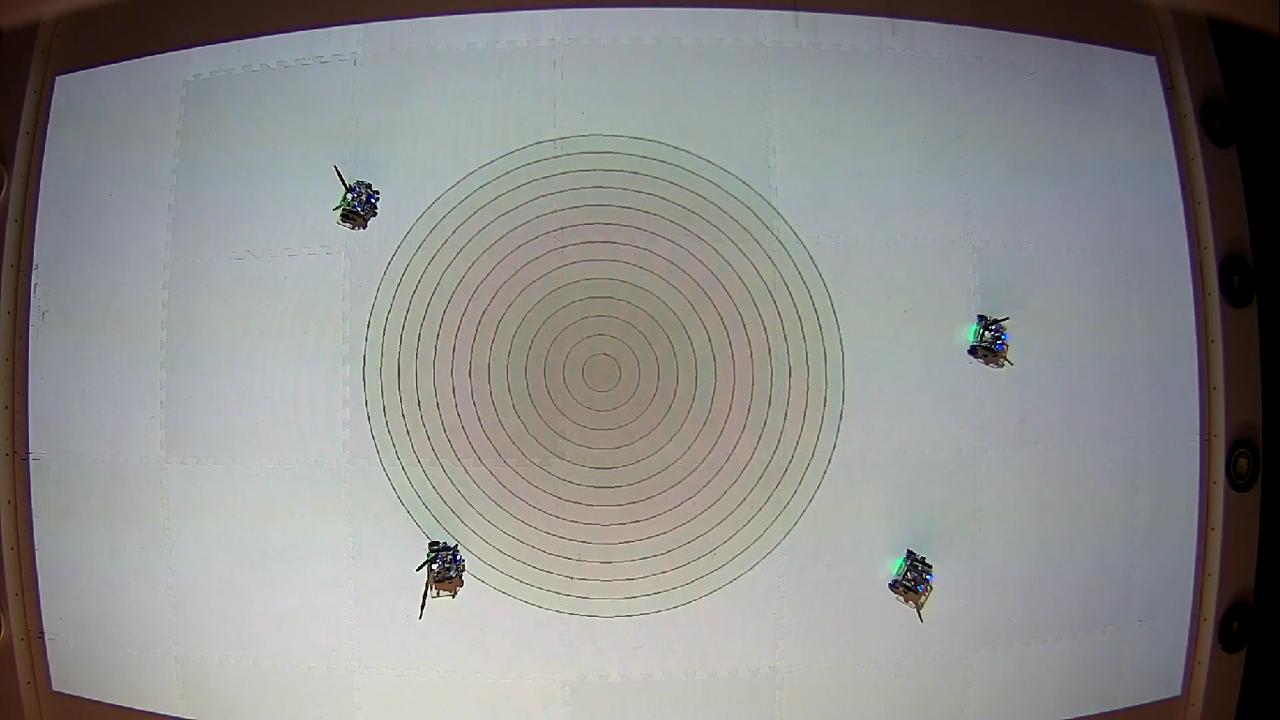
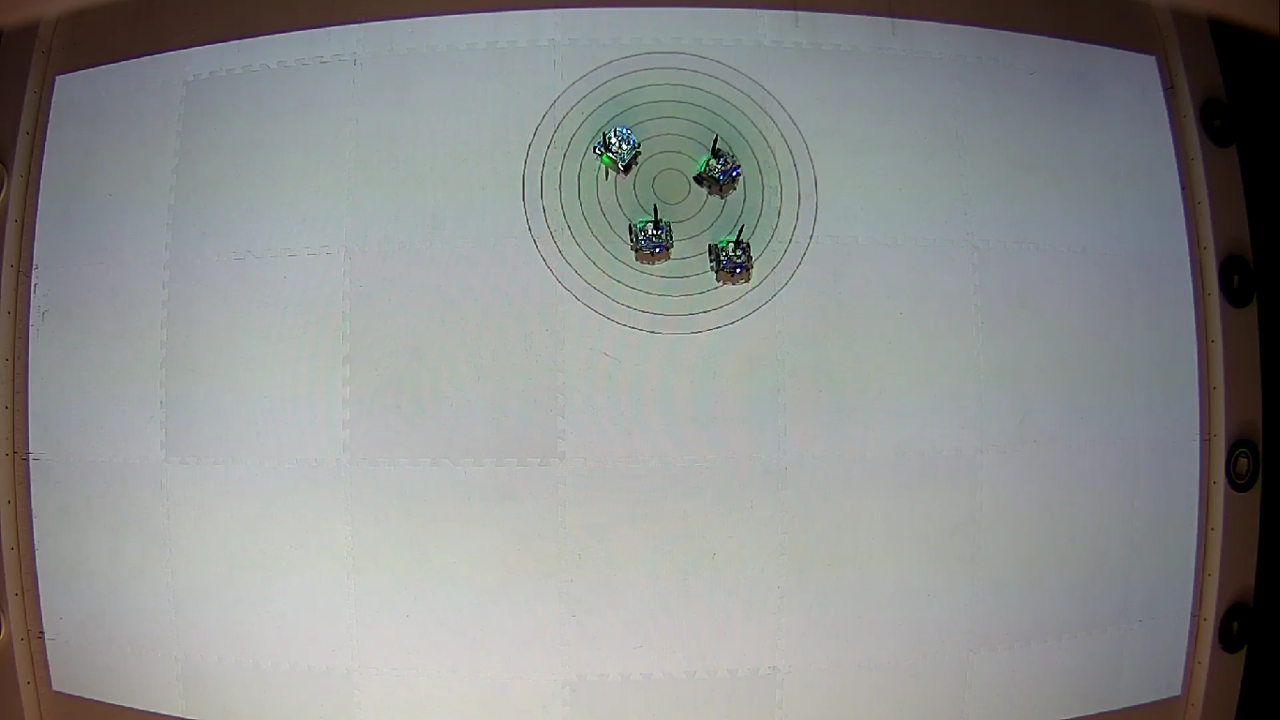
En este proyecto se propone la utilización de robots terrestres controlados a distancia para la búsqueda y localización de una fuga de gas. Se utiliza la plataforma de Robotarium (Laboratorio virtual de Georgia Tech) y se desarrolla la programación en Matlab del control de los vehículos terrestres, así como el modelo de dispersión de una fuente de gas.

Contacto
Mariana Guevara A01197249@itesm.mx